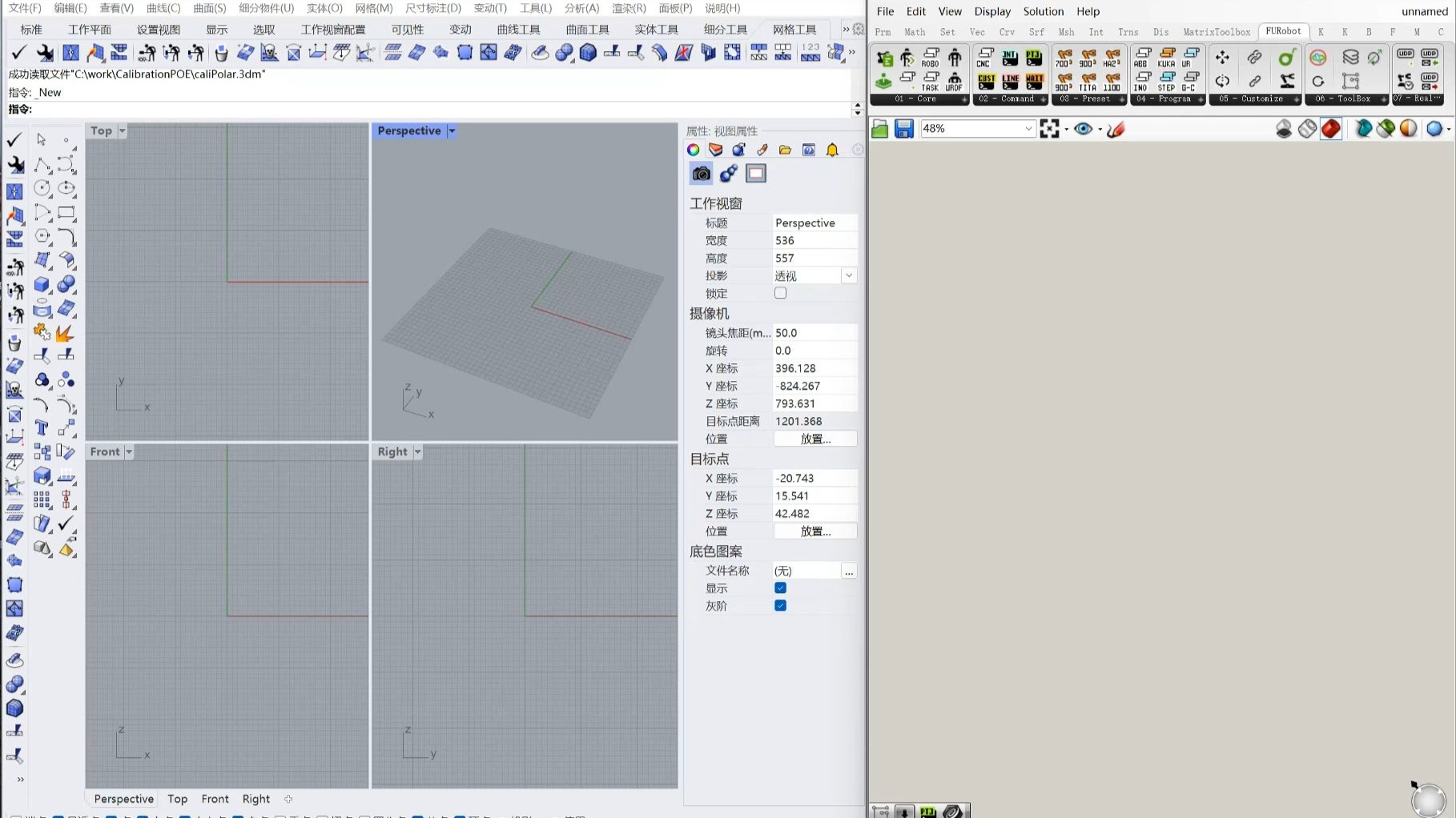
校正机械臂的绝对精度!首先你要先用furobot自定义一个机器人(看之前的教程),然后在用全站仪等方法来测量这个机器人末端的空间位置(相对于世界坐标系,也就是机器人的根坐标系,单位是m,如果不能相对于机器人的根坐标系,也要想办法用变换矩阵变换过去!),记录下末端的xyz(即工具头的tcp末端,如果不是,则必须在tool这里更换,类似视频00:55 的操作)和关节(单位是m和弧度),记录的样本越多越好,本例是50个,然后就可以用这个方法来更新机器人的运动学参数,这样就可以让机械臂运动在绝对位置上更加精确(精
主讲老师:周周 资深 杂志广告修图师、修图导师、自由摄影师 摄影师张悦、摄影师韩心璐 首席资深修图师
有兴趣学习SolidWorks入门、机械设计、钣金设计、非标机械结构设计等方面,可添加我【微星】 .................................................. YYF294
https://www.youtube.com/watch?v=eHWPZ5K4ESI
-
youtube
资料在评论区哦
傳說對決|暫停大法#16-璀璨排位 凱薩路必學觀念!這場遇到大神級對手,超強觀念這就是高端的細節!【佑哥】Arena of Valor筱清 095159传说对决
贫穷大学生别再卷时薪15的兼职了!学点PS,一单就赚回一周生活费!
趁着有点太阳,拍点日光下的状态,顺带测试锋利度——笨熊崽儿
睡觉睡觉,这一天的,小命要紧
【Enscape版本测试】4.11、4.2、3.56、3.2哪款渲染器,更清晰,更流畅,操控好,无延迟
野生技能协会 0