-
ytb
https://www.udemy.com/course/fl-studio-masterclass-music-production-for-beginners-to-pro/
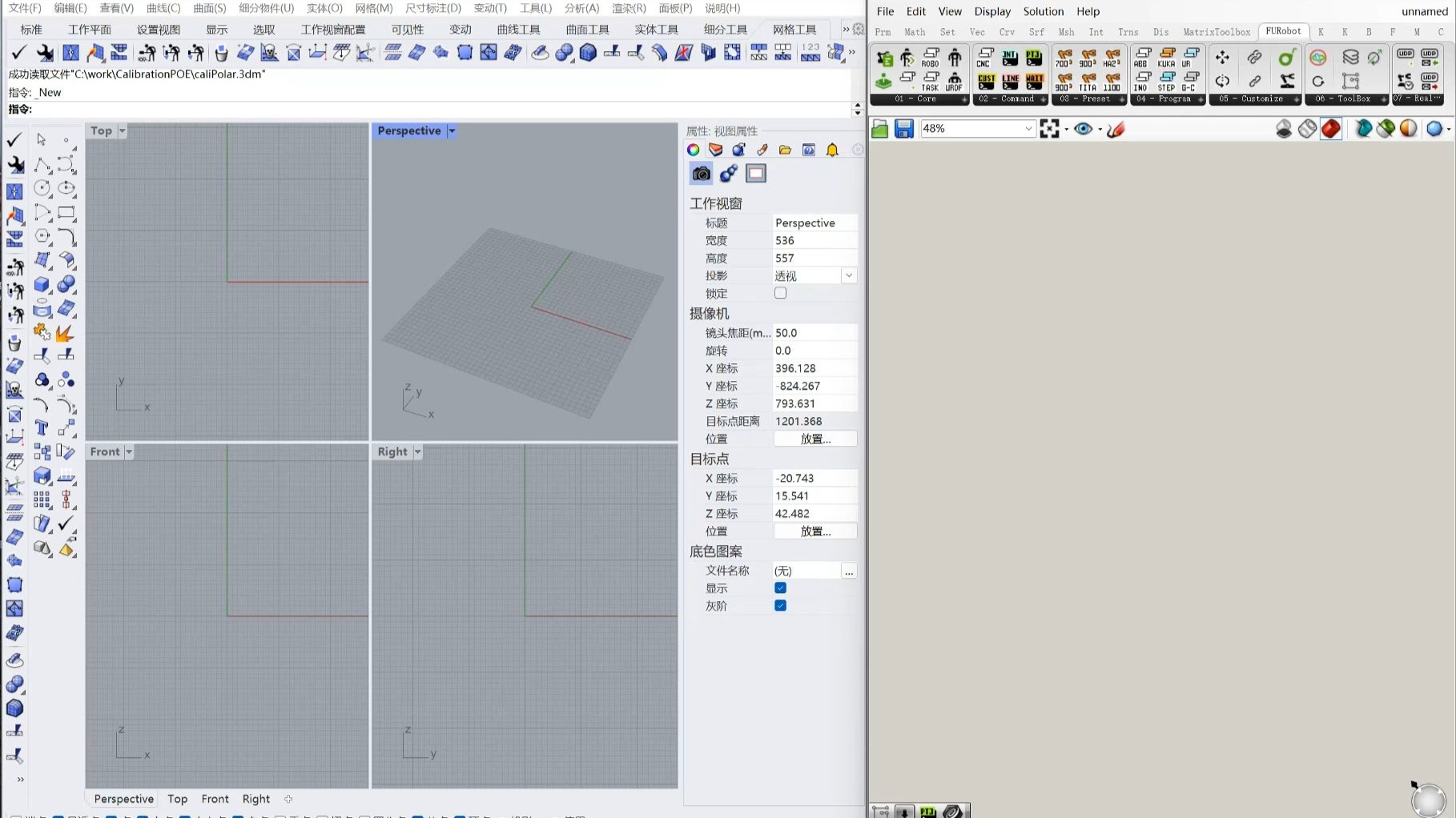
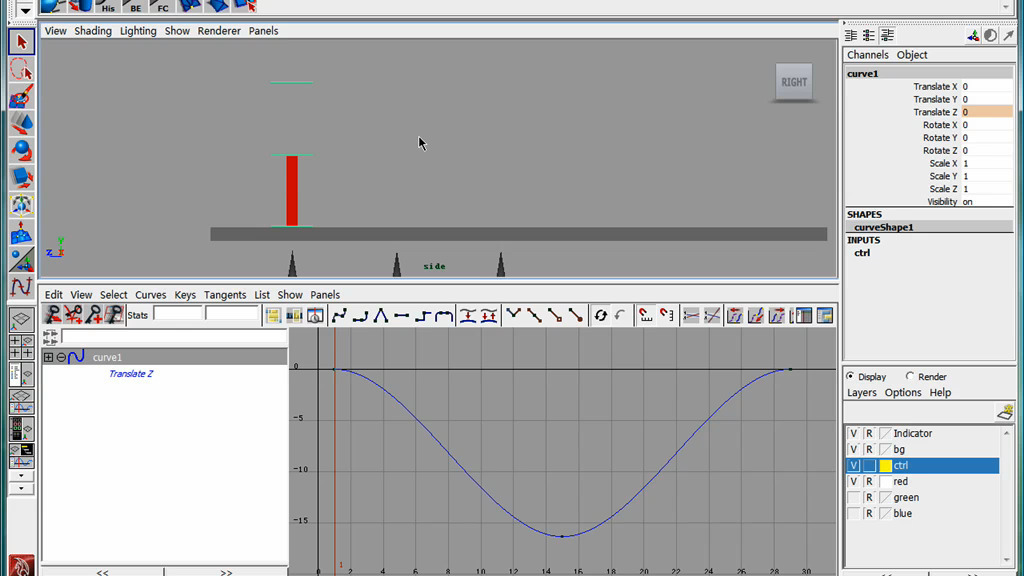
校正机械臂的绝对精度!首先你要先用furobot自定义一个机器人(看之前的教程),然后在用全站仪等方法来测量这个机器人末端的空间位置(相对于世界坐标系,也就是机器人的根坐标系,单位是m,如果不能相对于机器人的根坐标系,也要想办法用变换矩阵变换过去!),记录下末端的xyz(即工具头的tcp末端,如果不是,则必须在tool这里更换,类似视频00:55 的操作)和关节(单位是m和弧度),记录的样本越多越好,本例是50个,然后就可以用这个方法来更新机器人的运动学参数,这样就可以让机械臂运动在绝对位置上更加精确(精
勉费领取视频全套资料/文档/学习笔记点击:https://www.bilibili.com/opus/1056389494704439296?spm_id_from=333.999.0.0
EndNote 21.5:https://pan.quark.cn/s/7ce9b6a61b3c
讲述西藏政企客户经理徐静与同事们克服当地恶劣自然条件,用网络服务联通“最后一个通高速县城”。 #时代担当# #五年成就# #绿色发展# #乡村振兴# #社会责任# #担当故事# #责任故事#
强烈分享10个免费的查重网站
OZON跨境电商运营技巧,做ozon不会作图怎么办?ozon作图工具
下班后2小时,可以做的7个小业务
CDR制作太极图效果
为什么你拆的镶件总是被师傅骂?从入门到精通,一次讲透镶件拆分的底层逻辑!
野生技能协会 0