-
直径33mm,可调转速1000-16000/min,扭矩高达28Ncm,加工力度大。精度5um,铁铜铝钛合金钻孔、铣削加工可用。46排刀机、新代系统都能加装。气冷却,24小时无间断使用无压力。一台设备可加装多只主轴,实现复杂的加工工序。#机加工 #微型主轴 #精密主轴 #钻孔铣削 #排刀机加工
这款产品独具匠心,采用先进烘干技术,高效锁住营养,智能控温精准节能,外贸品质,亚马逊爆款,是您厨房的得力助手!
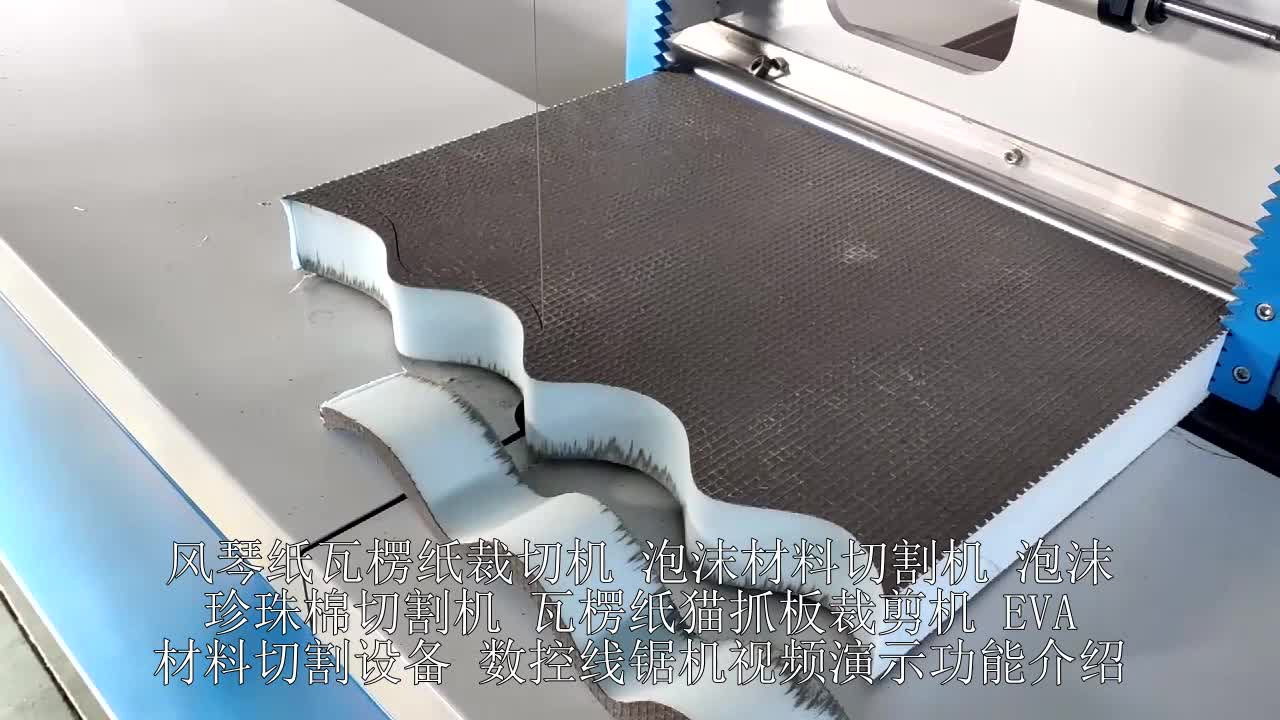
线锯机,猫抓板线锯机,瓦楞纸线锯机,金迈线锯机,线锯机器视频介绍。
IT隔离电源箱的安装位置选择: 方案一:利用污物通道夹层: 节约空间,利用现有结构,初始成本经济。 方案二:设置专用配电间:环境干燥洁净,维护便捷快速,不影响手术室洁净度与管理流线。
退伍军人应往届大学生手机家电机电及新能源汽车等人员各省辖运营中心人头涌动 无人机维修技术共享合伙人模式低空经济深蓝海的潜水炸弹普通人轻资产创业机会你无需人脉关系与公司合伙我们提供技术支持与维修订单让你轻松实现创富梦想在无人机维修暴利期成为新一波富翁快快加入集训创造自己的财富人生让我们生活共同美好
码垛机器人饼干码垛自动化”指通过工业机器人集成系统,针对饼干产品(多为盒装/袋装后成箱)的特性,自动完成饼干箱从输送线抓取、按预设垛型(如“井”字、“田”字)堆叠至托盘,实现饼干仓储前码垛环节无人化作业,是饼干规模化生产中衔接包装与仓储的核心自动化技术。
打磨机抛光片 四面抛光机木工(1)
三缸窄体柴油版滑移装载机实心胎能进电梯
PHA-107地坪防水涂料,存放的房间内,严禁吸烟或使用明火。
昊轩耐磨材料专注尼龙加工件。它以尼龙为原料,有多种优良性能,成型快效率高,能制作多种零件,应用广泛。厂家秉持品质与服务至上理念,期待成为您的伙伴。
PHA-107地坪防腐涂料,远离热源,避免日光直接照射并隔火种。
科工机械 0