使用龙神1.4.34模拟器运行的月姬R官方汉化版,实测bug最少,会一直更新,有问题欢迎进群提问,24h在线
下期大概改一下熔炉的ui,有啥建议赶紧提
四川联通融合套餐详解:https://www.bilibili.com/opus/1108340332526829576 有需要的朋友可以点击预约~ 携号转网/宽带注销/套餐办理均可咨询链接里的专属客服~ 首月免月租体验,不满意随时可退! https://b23.tv/mall-356iX-76AwL https://b23.tv/mall-356iX-766kN 联通专员24小时内和您联系沟通【可在线选号】 还有问题?欢迎留言评论!或者联系【融合光网】gzh咨询联通客服!!
冒泡排序冒泡排序C语言冒泡排序代码冒泡排序python冒泡排序C++冒泡排序算法冒泡排序java冒泡排序动画冒泡排序和选择排序冒泡排序原理
白天晚上不停的跑,很多人已疲惫不堪。视频发给中国好友转发
《老叉的线下达芬奇调色训练营》9月班招生中 【灵感库】【老叉的调色工具包】功能 都在视觉映像VisualMirroring 可以在线上分享平台免费获得视频内的素材和节点 达芬奇的系统课程也在线上分享平台持续更新 还有大量灰片素材提供练习 私聊或点我简介来加入吧~
如果内容对你有帮助,不要忘记三连和关注,分享给更多的人~
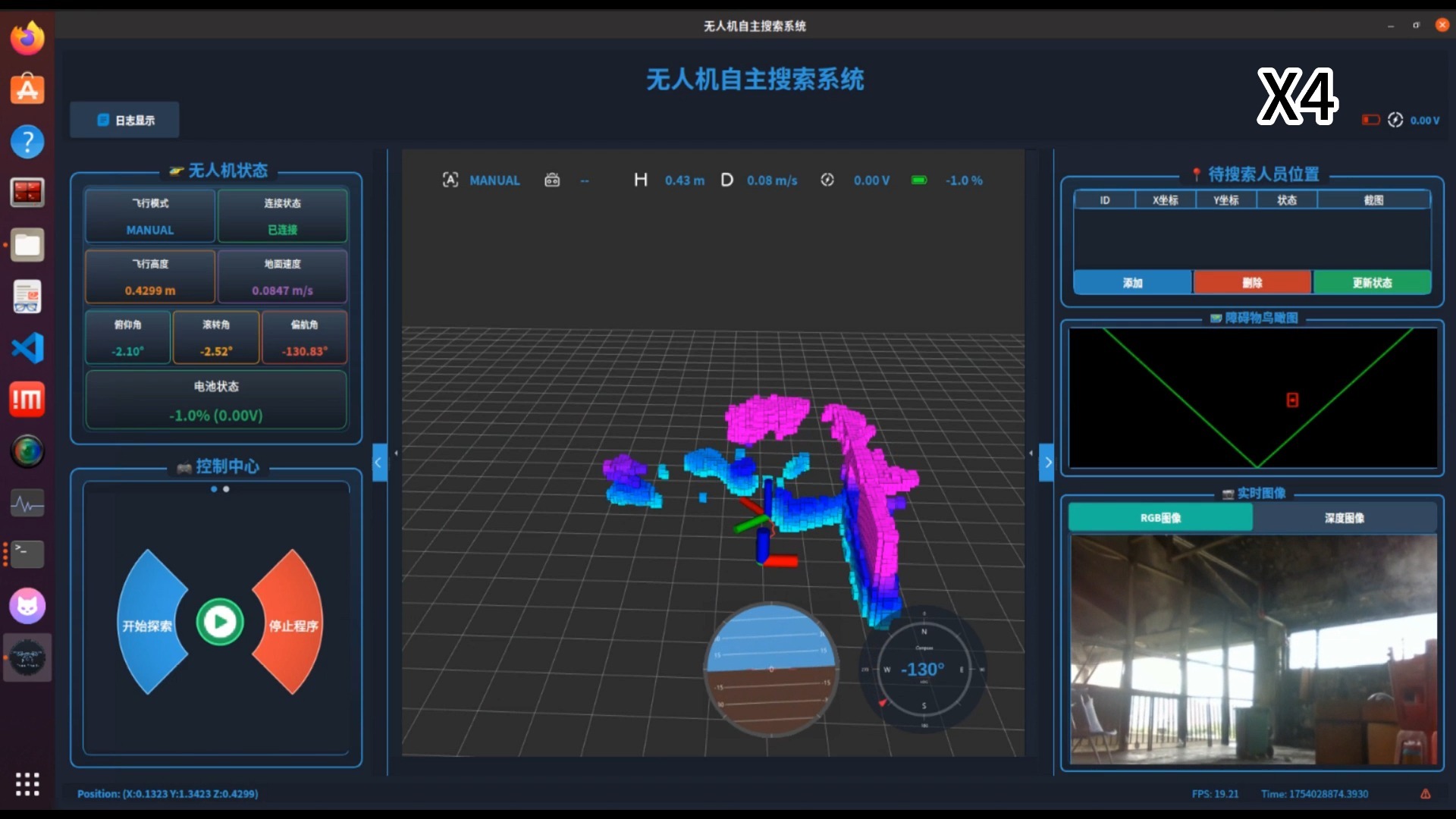
该项目由我们团队成员共同完成,获得第二十届研电赛华南赛区一等奖,全国决赛一等奖,其中我主要负责无人机动静态障碍物的识别,跟踪与规避部分的功能实现,以及系统可视界面设计和实现,演示视频剪辑等工作。 其中动态障碍物识别部分代码感谢徐博的开源贡献,代码参考:https://github.com/Zhefan-Xu/onboard_detector,动态障碍物规避的路径规划器参考ego-planner-v2进行修改 由于项目并不是我一个人完成的,无法进行所有的代码开源,所以仅开源由我独立完成的系统可视化界面(Rviz+Pyqt5):https://github.com/MGod-monkey/explore_system 可视化界面做了大量的资源优化,解决rviz闪退问题以及分辨率适配,所以对于需要一个自主的无人机系统软件界面是有着非常大的参考价值的,无论是跑ego还是fuel,只需要修改启动按钮绑定的脚本,Rviz的配置文件,以及软件中的话题即可
世博开源轮足优化版-TOMMY版本项目地址: https://gitee.com/myperworld/wrobot
视频制作不易,感谢三连支持!视频中工具,教程等都给大家打包好了,想要学习的小伙伴可以看置顶评论自取!
灵巧手实验成功,得改结构,太粗,有卡顿弯曲不了90度
iqoo15即将发布,花费五百提前做准备,朋友却说纯冤种...
教你20元复刻车载机器人mochi。
黑鲨GS3sport|健康监护 精准五星定位 续航持久、功能硬核全面的智能手表 黑鲨GS3sport上手体验!
249克一英寸!新云台逆天运镜?大疆mini5首发旅拍样片上线!
综合 0