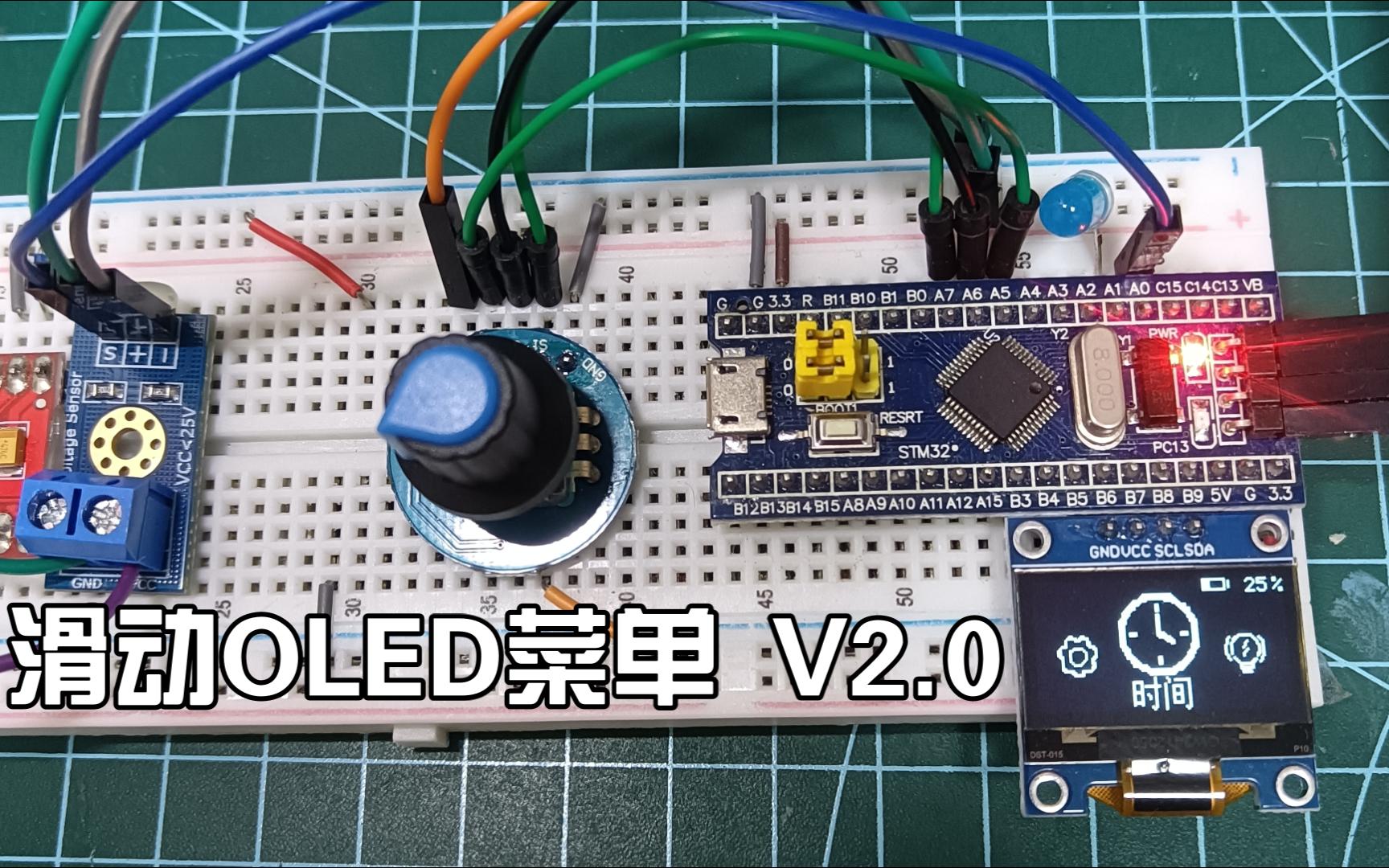
单片机:STM32F103C8T6,标注库函数 滑动OLED菜单V2.0,更新添加了时间、照明、电量页面功能。 后面根据情况看是否继续更新这个系列,后续考虑增加无线模块,实现自动同步天气和更新时间,完善设置功能页面。
——配置—— CPU:Intel i5 13400F 主板:铭瑄 终结者B760ITX D4 WIFI V2 散热:利民 AXP90-X36 内存:金百达 银爵16G(8G*2)3200MHz 硬盘:西数 SN5000 1TB 显卡:技嘉 RTX 5060 OC Low Profile 8G 电源:北方优易 FL-450M全模组(升级建准风扇) 机箱:乔思伯 NV10(自带PCIe4.0延长线)
老王在2年前辞职做了一名专业摄影师 但是在辞职之前经过了大量的拍摄和练习 摄影没有那么难 知道自己的上限和下限很重要 特别感谢:老王
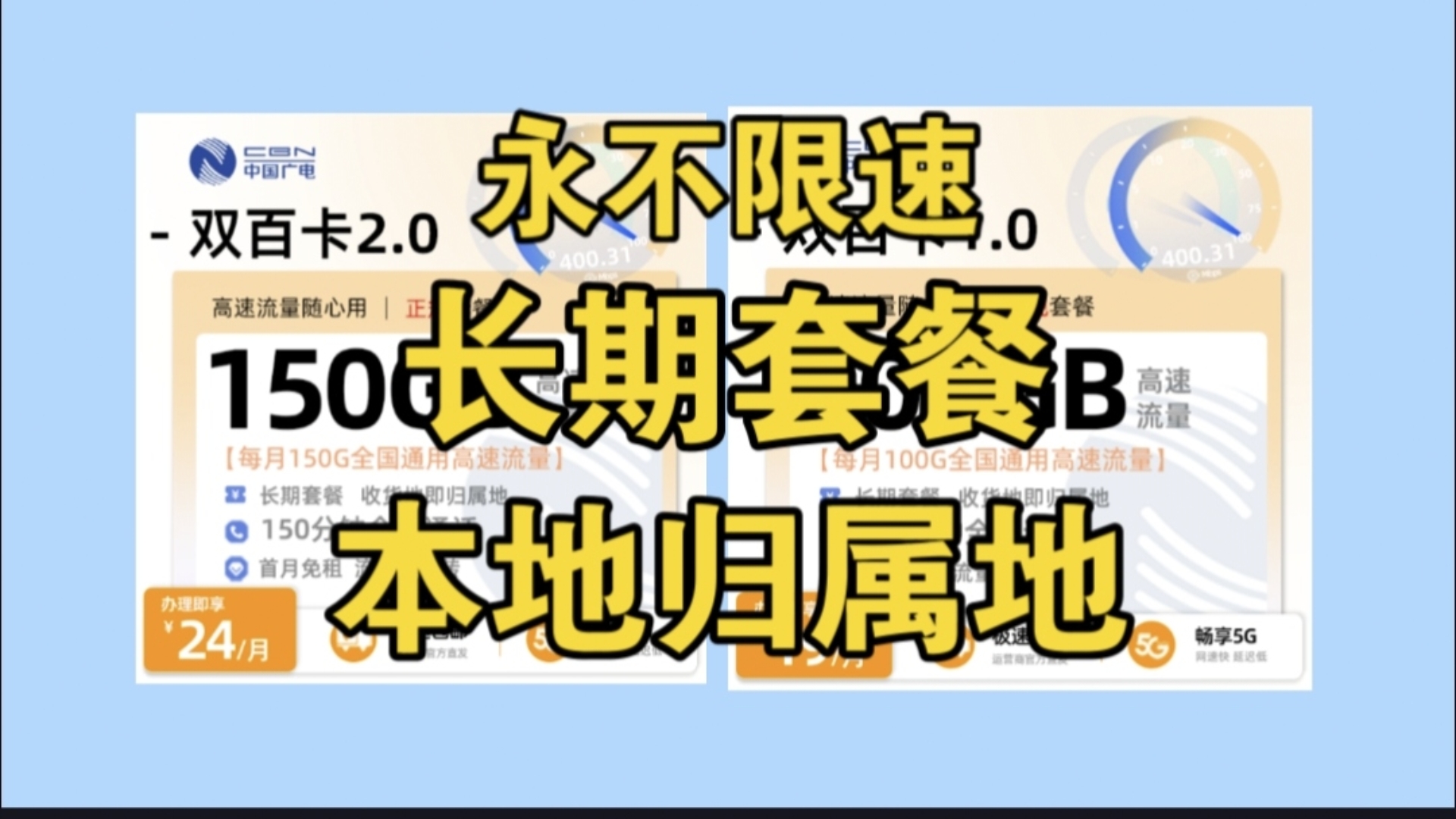
广电双百卡1.0(可选号)19元/月享100G全国通用+100分钟通话(在线选号),办理地址:https://ka.kaduoduohk.com/order/index?uid=dlUzVlQ0OVVwV0U9&pid=414 广电双百卡2.0(可选号)24元/月享150G全国通用+150分钟全国通话(在线选号),办理地址:https://ka.kaduoduohk.com/order/index?uid=dlUzVlQ0OVVwV0U9&pid=413
少女前线维克托冲锋枪
ISS Time-lapse: Asian Fish Bait (2024) 1 国际空间站拍摄地球夜景延时,技术进步使其越来越精彩 2 从印度洋,到南海,东海,黄海,对马海峡,直到日本以东,海上到处是渔火 3 3晚的渔火加3次飞过中国,知道自己大致位置,就能看出哪片灯火属于你 4 孤独的平壤,华北棋盘式的城市,偏僻的俄国远东和拥挤的东南亚
-
【手把手教你打造平衡步兵轮足】开讲啦!本系列课将继续深入讲解StackForce 大轮足机器人如何利用LQR控制实现自稳定控制的。本节课我将从LQR的系统建模开始,一步步推导出轮足机器人的系统模型,为下一节课的最优控制和LQR实现作铺垫。 本视频的机器人基于我开发的StackForce轻量级机器人开发平台(视频:BV1BZ421g7xQ)进行开源。在这个系列的课程中,我将会从原理入手,再到代码实践,实物调试。深入浅出的带着大家学习轮足机器人的全套原理知识,算法知识,并做出属于自己的轮足机器人!成为轮足机器人专家! 轮足机器人开源地址:https://gitee.com/StackForce/gaint_bipedal_wheeled_robot 轻量级机器人开发平台文档:https://stackforce.cc/#/ 轻量级机器人开发平台配套机器人项目开源:https://gitee.com/StackForce
我就是拍糖水照,有问题吗?为什么说玩摄影不要太把“艺术”当回事?
上个月工作报告
华为,为中国的科技自主做出的贡献不可磨灭
斗战者战7000酷睿版首发评测:性价比更进一步,还能越级挑战
【CamLogic相机逻辑】绝对能飞的充电宝!尼泊尔外拍实测 安克能量舱
综合 0