-
什么你竟然不三连?昂达八嘎!!!
需要软件安装包的请一键三连支持,然后关注UP主,私信回复:prism,即可免费领取。
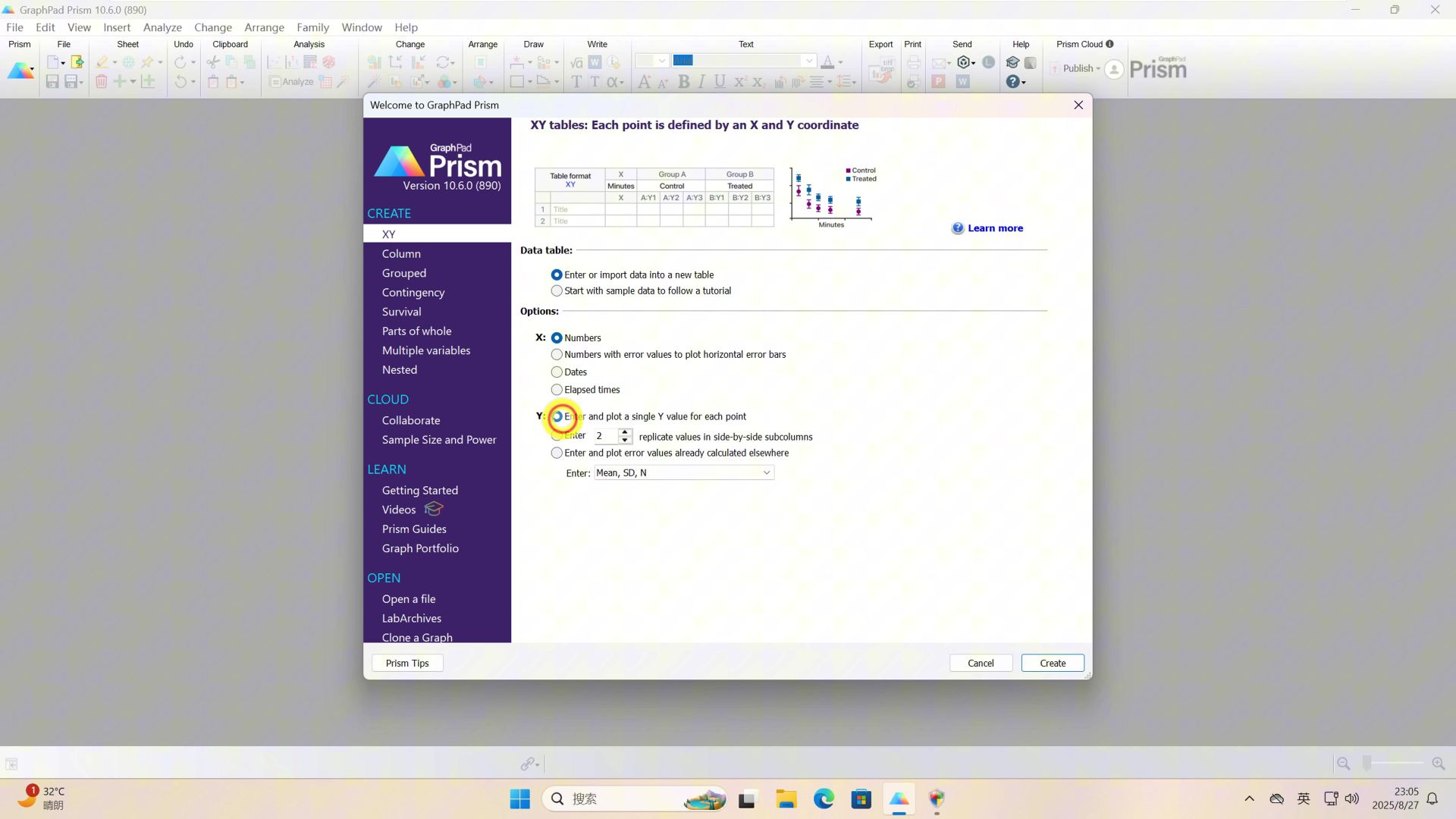
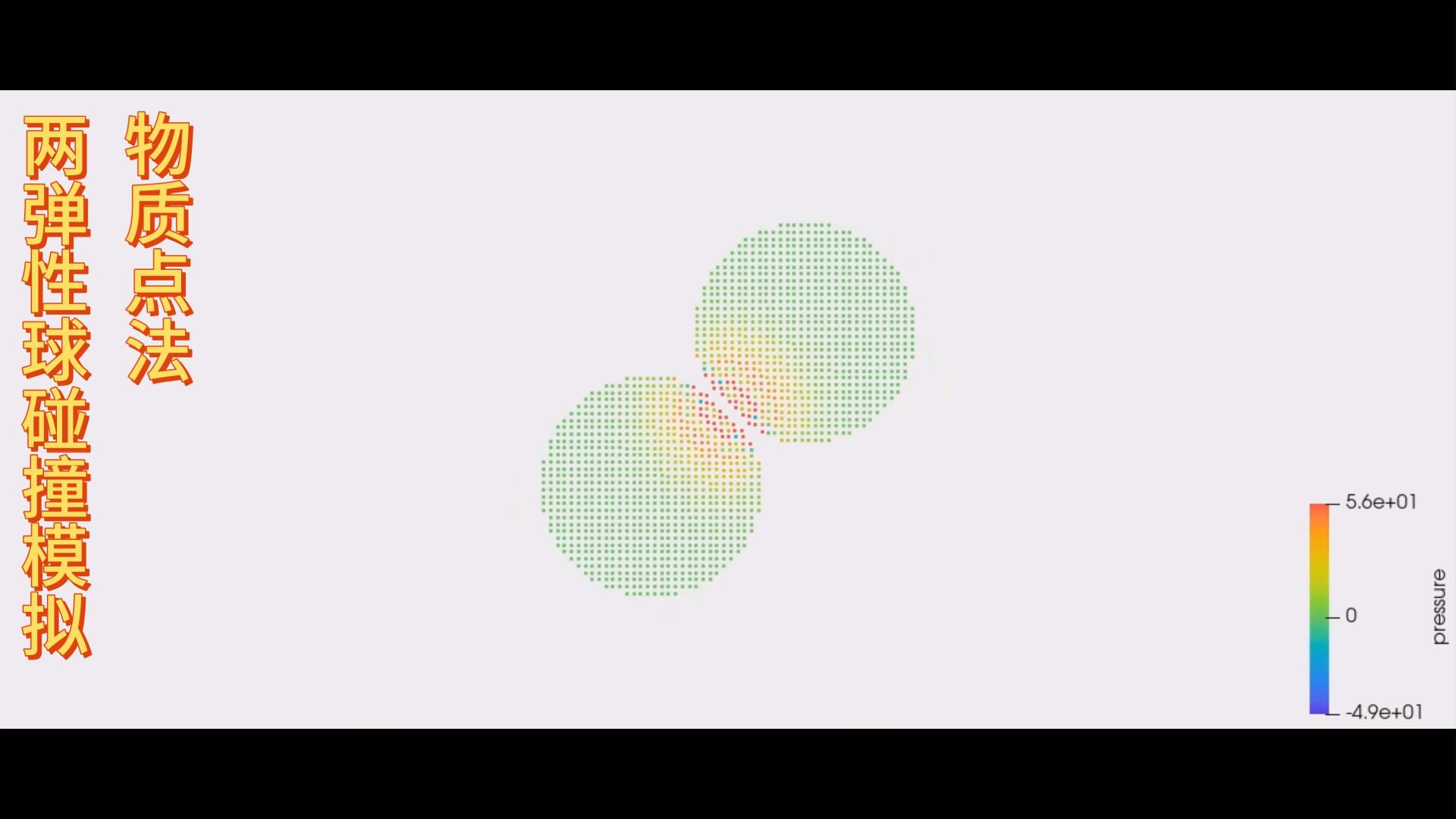
分享开源MATLAB物质点法代码——以两弹性球碰撞为例
本期为大家带来的是四款旗舰头戴式电竞耳机横评,临近开学季相信也有不少小伙伴想为自己新添一款心仪的耳机,希望本期视频对你的选择会有所帮助。
感谢大家的支持, 虾球姥爷---卫星轴 HiZaSaYa- 免费填充 平凡--小白- 免费填充 目前还剩80把键盘填充名额。大家加油,记得点关注 免费改100把键盘合集不会断, 所以感谢大家的理解和陪伴,我加油更! up的小破群想加的朋友们私信我 关注我一个有温度的UP主
作为键鼠玩家你是不是也会羡慕手柄带来的震动反馈 直接用手柄玩fps先不说游戏适配 光是瞄准就很吃力 就没有一款能实现震动反馈的鼠标吗 在我浏览了众多厂商的产品后 还真让我找到了 它就是英菲克IN9 Ultra枪火版 以主机玩家沉浸感为设计点 斩获了德国红点奖和法国设计金奖 是实现了全感交互的电竞旗舰鼠标
新手笔记本电脑买前必看,不要踩坑啦!
Godot版本:v4.4.1
陆战之王 豹二
国产倾转旋翼机抄袭V22鱼鹰?抄你3天摔9架事故率冠绝全球?
(水视频)简简单单装个机【凌冰Koori】
iPhone17都还未发售,配件却在多个购物平台上随处可见,想不到坑早已布置好,要怎样避免商家的陷阱,视频教会你方法!!
万象更新,一如初见
综合 0