这期视频分为两个部分,前半段还是传统的荣耀Magic8 Pro硬件评测,而后半段我们重点来看一看手机上的 AI,和我们的豆包、DeepSeek 到底有什么区别?通过了信通院 L3 认证的 AI 手机,到底能实现哪些有价值、实用性的操作?
改了一下,变得更SFW了(大晚上的给我整得一惊一乍的)
火枪进化史
教程合集:https://github.com/echonoshy/cgft-llm
‼️兴戈空屿EH500是我拥有的第二台国产头戴式耳机,音质还不错 ‼️目前拥有耳机阵列:宝华韦健Px8&Px7S2e、索尼XM6、索尼XM5、AirPods Max、Dyson Zone、万兆 OneOdio A6
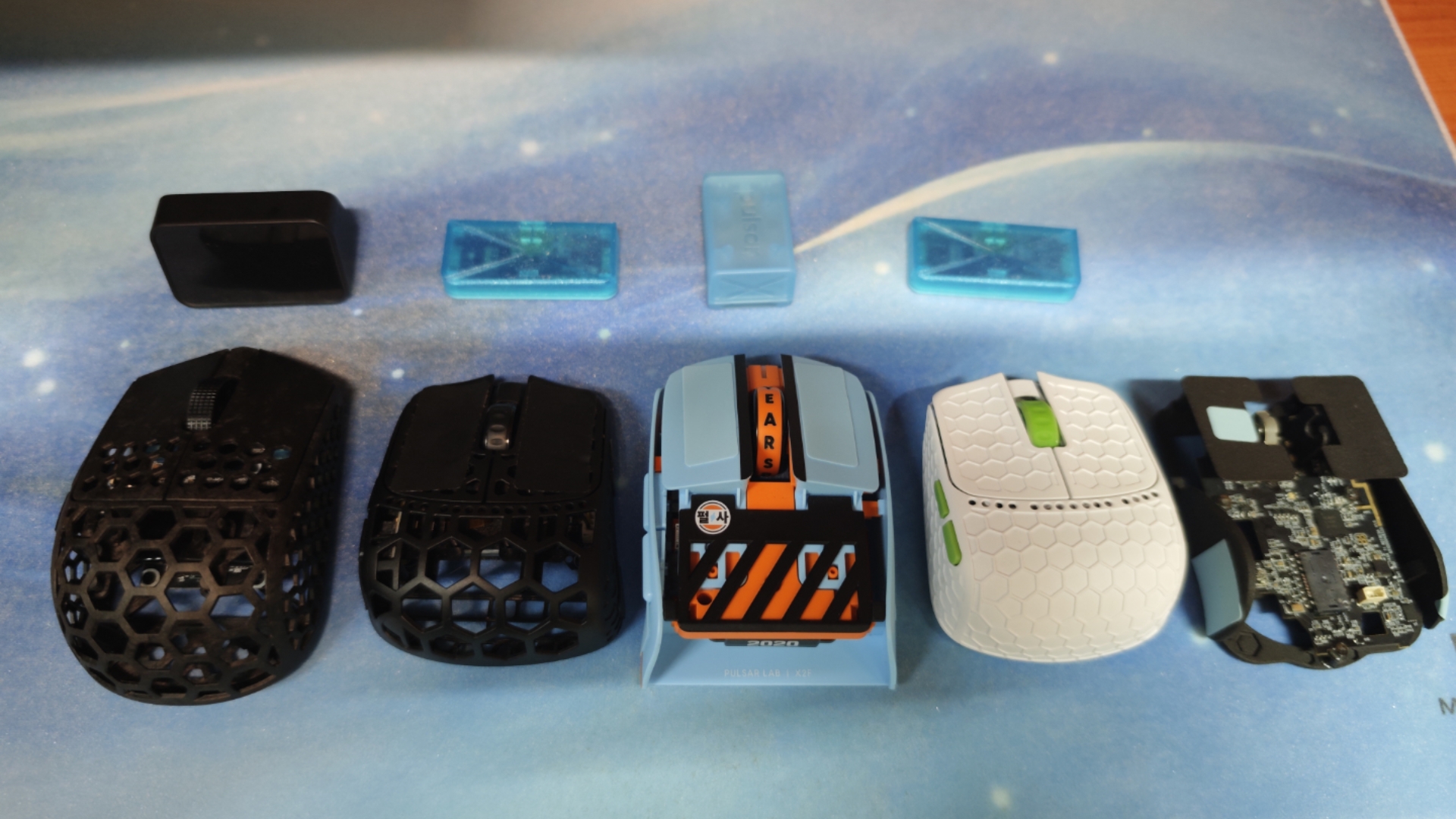
感谢两位不愿意透露姓名的群友借我的x2f和m5air
京东云活动入口: https://3.cn/2d-tWFy0 【6.5折卷】 https://www.aliyun.com/minisite/goods?userCode=3aqg2ypf 【学生党免费领】 https://university.aliyun.com/mobile?userCode=3aqg2ypf 【无影云】 https://www.aliyun.com/activity/wuyi
富士目前XF卡口的56/1.2售价约6000+,而F1.2大光圈——对半画幅机身更为重要。 现在,唯卓仕推出了AF 56/1.2Pro XF,售价直接腰斩。 画质解析力如何?对焦表现如何? 我们本次来到了江浙户外的小溪,带你感受唯卓仕AF 56/1.2Pro XF的实拍表现
【一图流】2025 11.11机械键盘推荐,实拍视频+思维导图一图流模式!包含千元以内60、75、87、98、108配列全尺寸键盘
人人都看得懂!!!AYANEO Pocket Air mini复古掌机纯萌新小白手把手保姆级折腾玩机教程!!!
苹果17值得升级吗?看完对比测试,你可能会有答案
2025国内外自媒体谁更强?对比全球iPhone 17视频!
“别眨眼!三秒以后会很绝~”
综合 0