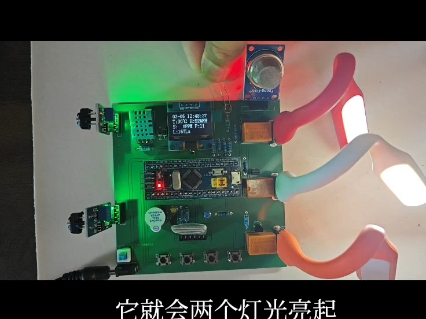
麦克风阵列—开发板—算法处理—显示
分享一个低成本制作OpenIPC 眼镜的方法,思路是把模拟图传眼罩改造成一个支持HDMI输入显示的眼罩 这个方案还有进一步优化和拓展的空间
-
https://youtube.com/shorts/zZa7eZlRtLE?si=dog8iVpj_og--4jp 3D printed Upgraded Squid Game Knife
改装智商充电宝
油管
3d蜡镶机器人 研发分享
Model #001
用nano banana做了一款AI 光影匹配器
U1 视频指南:如何将 SnapDryer 与 Snapmaker U1 配合使用
微星游戏电竞显示屏,3ms疾速响应,让竞技画面流畅不拖影。打游戏、看大片都细腻清晰,快人一步的沉浸体验,真实提升使用满意度。
拓竹P2S 碰玻璃解决方案。
极客DIY 0