-
★一键三连,私信我“工程文件”,免费获取工程文件。 ★Up的技术交流群:544218095 ★如果您有什么想翻译的外语教程,也可以私信Up。 ★Up机翻+中文AI配音,因为语言的语速不一样,可能会出现少量语音与字幕不匹配的地方。
运维实用工具包+零基础入门进阶教程+系统学习路线+面试真题+考证题库+高级运维职业规划+红帽/K8S/Linux课程咨询等,获取方式:👉https://www.bilibili.com/opus/1087243710843846680
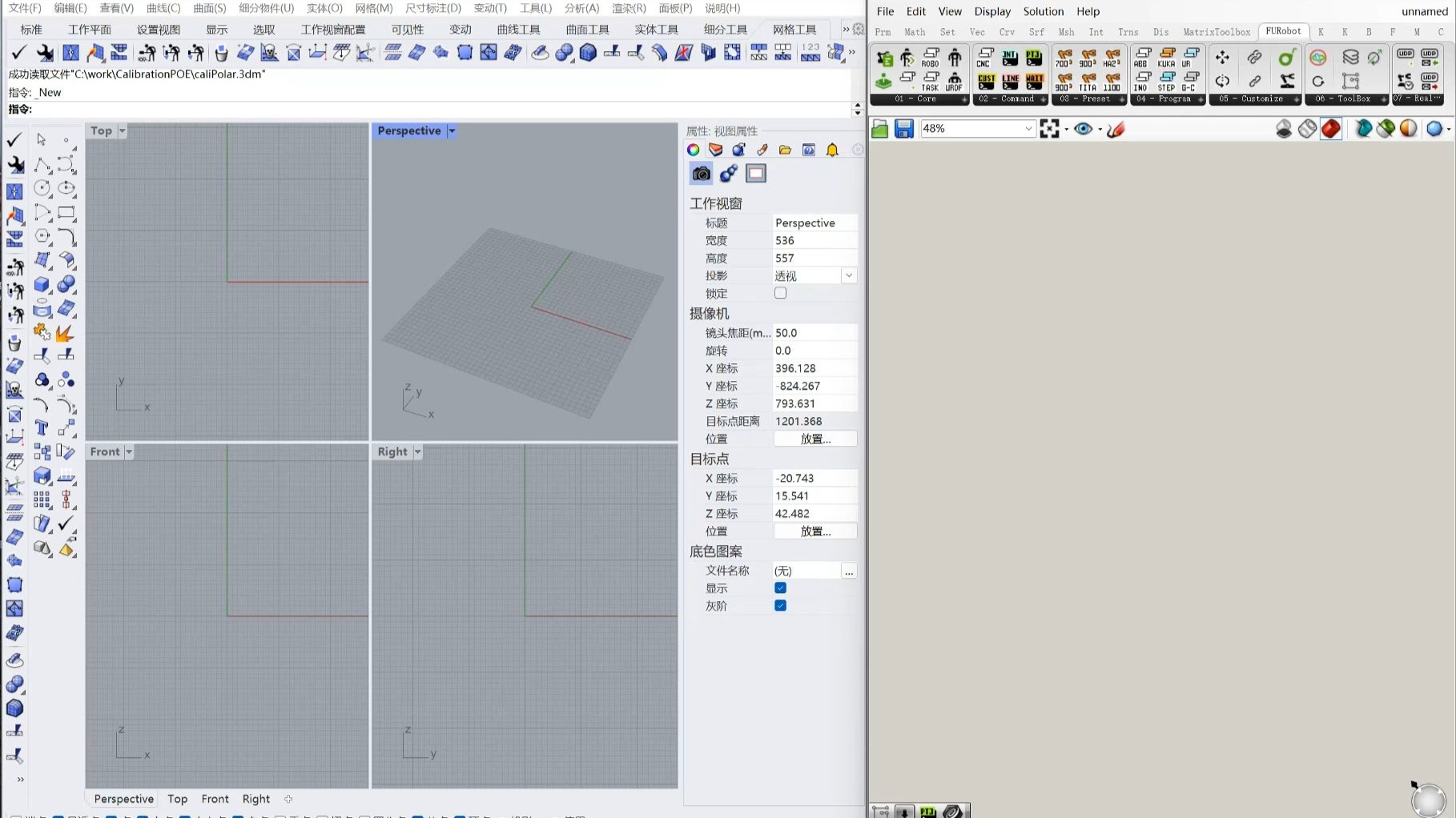
校正机械臂的绝对精度!首先你要先用furobot自定义一个机器人(看之前的教程),然后在用全站仪等方法来测量这个机器人末端的空间位置(相对于世界坐标系,也就是机器人的根坐标系,单位是m,如果不能相对于机器人的根坐标系,也要想办法用变换矩阵变换过去!),记录下末端的xyz(即工具头的tcp末端,如果不是,则必须在tool这里更换,类似视频00:55 的操作)和关节(单位是m和弧度),记录的样本越多越好,本例是50个,然后就可以用这个方法来更新机器人的运动学参数,这样就可以让机械臂运动在绝对位置上更加精确(精
使用三菱编程软件GXWorks2与组态触摸屏仿真软件联合运行 抖音哔站小红书快手:电气肥涛 Q1684916864 V18 897 832 050
宝子们!做换热器内流场仿真是不是总栽在网格上?要么几何清理半天搞不定,要么划出来的网格质量差、一计算就崩,新手更是对着 HyperMesh 无从下手…这次专门拆解换热器内流场的 HyperMesh 网格划分全流程! 每一步都结合内流场仿真的需求讲,新手能避坑,老手能提速,看完就能跟着练! 觉得这份干货能帮到你?一定要一键三连支持下!评论区敲【仿真 666】,马上私发你配套的资料模型,跟着实操效率直接拉满,再也不用瞎琢磨~
SketchUp2025:https://pan.quark.cn/s/0ed7cd807f49
感谢您的观看和对我的支持!如果大家想和我交流互动请观看下方信息 可以加微信号:xiaowang_dalai(欢迎做个自我介绍) 网址:www.arthurslog.com 邮箱:aboveactual@gmail.com
【2025最新PR教程】Premiere保姆级教程 | 影视剪辑零基础入门到精通教程 | PR影视后期制作 | 视频剪辑后期特效制作 | 系统教程全套
【PPT办公软件教程】PPT保姆级教程 | 手把手带你从小白到大神 | 职场办公软件精通教程 | 全程干货无废话 | B站最用心的office办公软件教程
Notion美化技巧与实用窍门
【3dmax建模】(iPhone 17)建模案例,零基础布线讲解,3dmax新手建模案例教学
给学员看代码直接把我电脑关机了
野生技能协会 0