持续分享ai教程,欢迎关注............. Blender+Comfyui工作流下方滴滴快速抱走
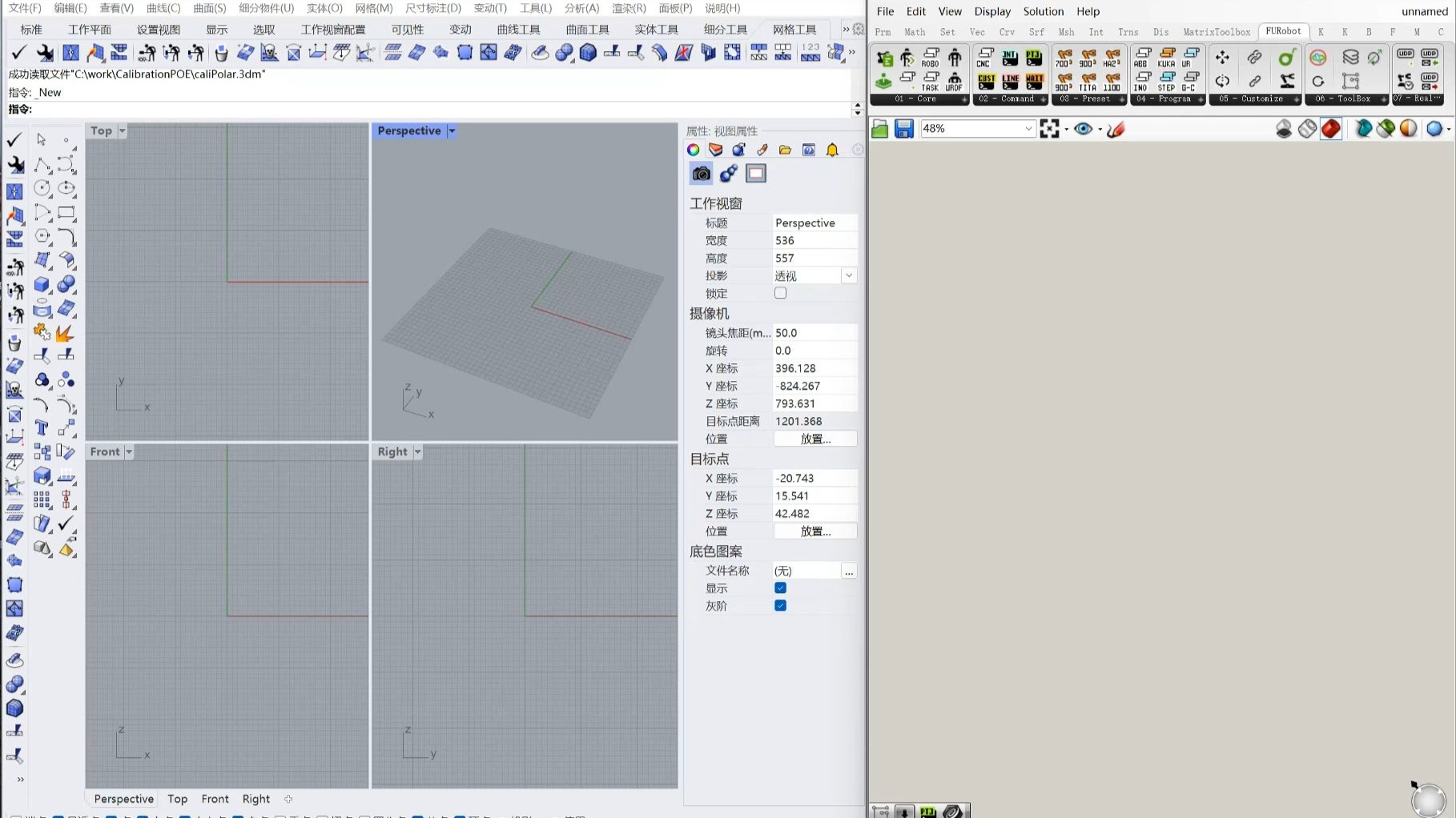
校正机械臂的绝对精度!首先你要先用furobot自定义一个机器人(看之前的教程),然后在用全站仪等方法来测量这个机器人末端的空间位置(相对于世界坐标系,也就是机器人的根坐标系,单位是m,如果不能相对于机器人的根坐标系,也要想办法用变换矩阵变换过去!),记录下末端的xyz(即工具头的tcp末端,如果不是,则必须在tool这里更换,类似视频00:55 的操作)和关节(单位是m和弧度),记录的样本越多越好,本例是50个,然后就可以用这个方法来更新机器人的运动学参数,这样就可以让机械臂运动在绝对位置上更加精确(精
iiivfx.com 核心模块解析:基础流体模拟(飞溅/泡沫/气泡物理特性实现)、激流(whitewater)进阶模拟控制 引擎整合流程:与Unreal Engine搭配,含虚幻引擎导入与渲染等实用示例。 参数深度掌握:核心参数功能解析(从基础到进阶控制系https://ae-houdini.com/archives/44079 复制到浏览器
-
【2025最新PR教程】Premiere保姆级教程 | 影视剪辑零基础入门到精通教程 | PR影视后期制作 | 视频剪辑后期特效制作 | 系统教程全套
【PPT办公软件教程】PPT保姆级教程 | 手把手带你从小白到大神 | 职场办公软件精通教程 | 全程干货无废话 | B站最用心的office办公软件教程
Notion美化技巧与实用窍门
【3dmax建模】(iPhone 17)建模案例,零基础布线讲解,3dmax新手建模案例教学
给学员看代码直接把我电脑关机了
野生技能协会 0