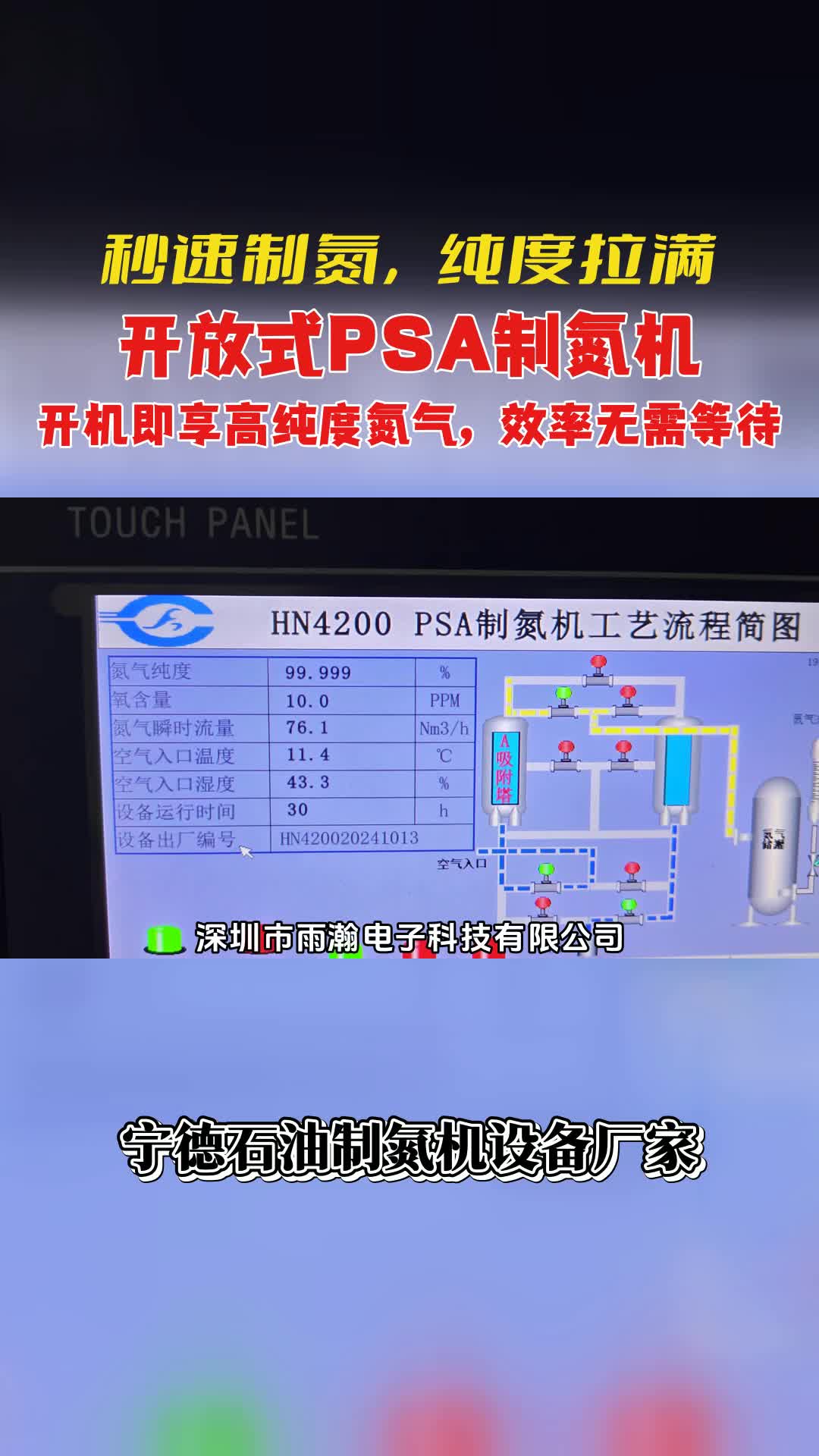
宁德石油制氮机设备厂家,深圳市雨瀚电子科技有限公司,专注工业气体设备,研发制造与服务,在此期间不断创新,提供高品质设备与服务,为各行业发展助力添彩,P
宁德石油制氮机设备厂家,深圳市雨瀚电子科技有限公司,专注工业气体设备,研发制造与服务,在此期间不断创新,提供高品质设备与服务,为各行业发展助力添彩,PSA变压吸附制氮机,具备多重安全防护功能,如压力过载保护,漏电保护,氮气浓度报警等系统,全方位保障设备运行安全,让您使用无忧,雨瀚制氮机安装后,免费提供首次调试服务,工程师现场校准参数,测试性能,确保制氮机达到,最佳运行状态后再交付使用,
立即观看